第12關:軌道對接
這是training關卡最難的一關
玩家也非常難以自行摸索出辦法
如果學會了,後面兩關捕捉小行星就很簡單了
步驟大綱
1 先把兩船的軌道平面對齊,消滅傾角
2 抓時間點點火,Transfer到相同的軌道高度,剛好到達目標附近
3 消滅相對速度,進入相對靜止的狀態
4 朝目標加速,縮短彼此距離
5 反覆3、4步驟,直到兩船非常靠近
6 開RCS平推對接
過關流程:
由於巴哈wiki喜歡壓縮圖片的解析度
所以這裡的截圖都盡量只保留重點
避免該看見的字小到看不見了
首先要切到地圖模式,看見另外一隻船
對它點擊後設為目標,點『Set as Target』
當另外一台船被設為目標之後
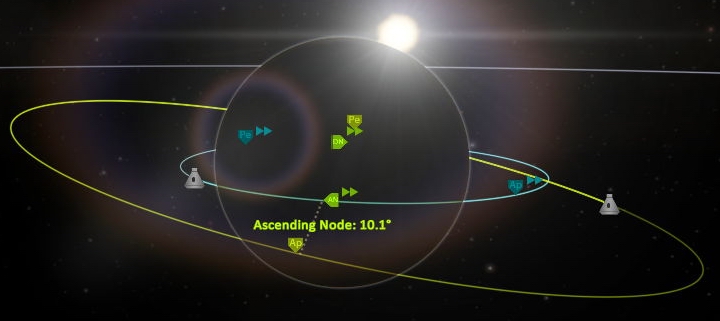
就可以看見軌道交錯點An與Dn
請在這兩個位置選一個做變軌
使用Normal或是Anti Normal消滅軌道傾角
正在消滅傾角中,還剩下4.1度
注意當角度下降到1度的時候就要把引擎火力關小
最後面的角度調整非常敏感
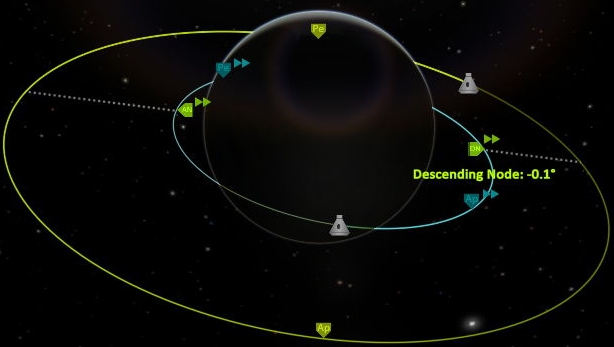
因為點火的時機有點晚,不能完全消滅傾角
如果發生這種情況,請把An與Dn推到與船隻軌道相位差90就是最小的了
然後再修正一次
一樣把An與Dn推到距離自己前後差90度
這樣剩下的角度差異不超過修正前的一半
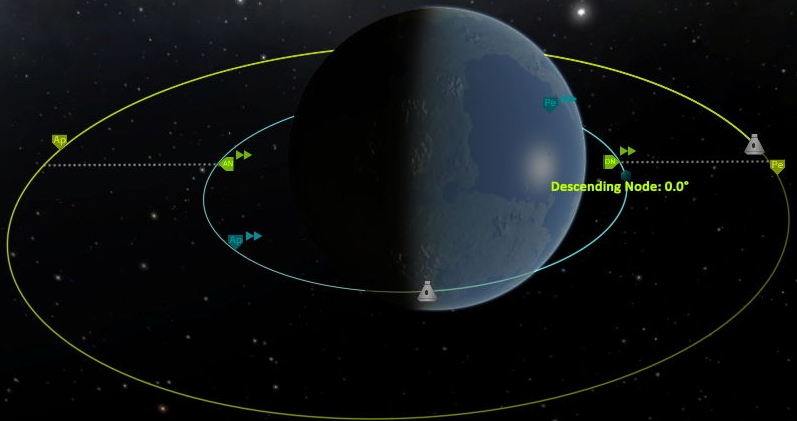
之前就只剩0.1度,第二次修正之後畫面上只會顯示0.0度
傾角消滅之後,接下來就是抓會合點
先在軌道上隨便拉個變軌點
然後往前進方向拉deltaV
使軌道對面高度足夠穿過對方船隻的軌道
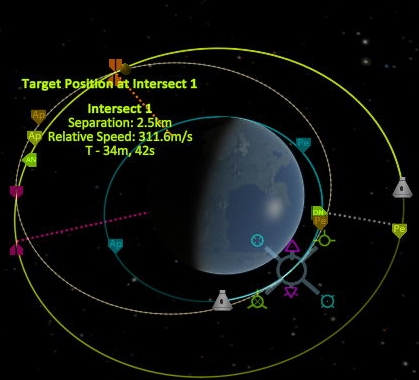
這個時候畫面上會出現會合的符號
『上往下』與『下往上』的箭頭分別表示最靠近時的雙方船隻位置
上方箭頭是自己船隻最接近目標時的位置
下方箭頭則是Target最接近自己時的位置
有兩組顏色,橘色是軌道由低往高穿過的最近點
紫紅色則是高往低穿過時的最近點
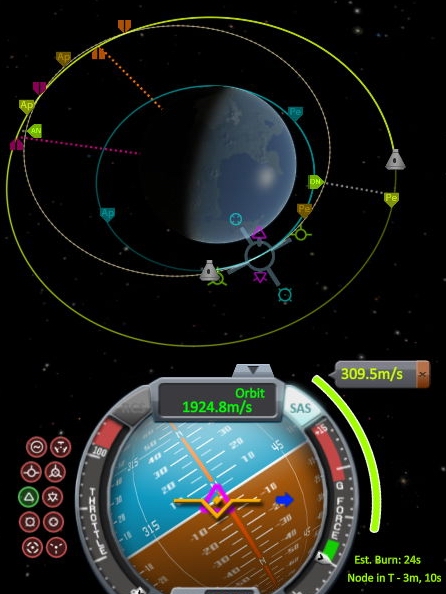
調整變軌點的點火時機與deltaV量
讓橘色或是紫紅色的其中一組箭頭上下對齊
這裡截圖是選擇讓橘色的這組對齊
把滑鼠放到箭頭上去看,可以知道兩船屆時會距離多遠
關卡會要求玩家要調整出最近距離短於5km才給繼續下一步
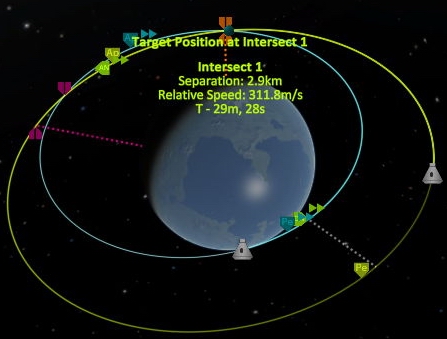
真的點火完之後會有點誤差
不過距離3公里不到也還在可以接受的範圍內
接下來快轉到會合點之前,距離夠近時兩隻船就能以目視觀察看到了
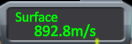
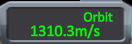
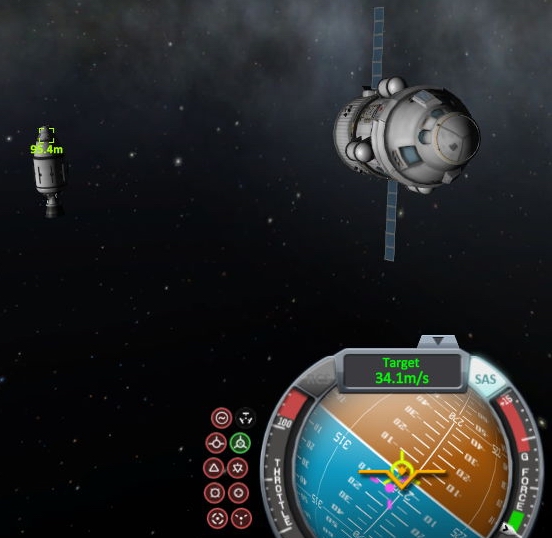
這個時候請把陀螺儀上方的速度模式切換成Target模式
Target模式的速度是兩船彼此的相對速度
這樣才能夠進行會合
切到主畫面看一下目標船隻的距離,然後把船隻對準減速方向
引擎點火減速。因為目前是Target模式,所以其實是消滅相對速度
相對速度歸零了,兩船就會保持相對靜止
不會再有明顯的距離變化
因為減速的點火時間有點太晚,所以對方船隻衝過去了一點
距離變成3.6km,比會合之前估計的更遠
相對速度歸零,距離又很近
這個時候按M切出去看地圖會發現兩船軌道已經幾乎完全重合
到這邊就算成功一半囉,接下來要想辦法拉近兩船距離
開SAS把船隻對準Target方向,在陀螺儀左邊10個方向的左下方
對準之後引擎點火,船就會往目標衝囉
在撞上對方之前,先把船隻對準減速方向,夠近就可以立刻減速
如果想要更準確的話,可以嘗試用陀螺儀轉向加引擎點火調整,把速度方向對齊目標方向
夠靠近了就把相對速度再次歸零
這時候兩台船隻彼此就近在眼前了
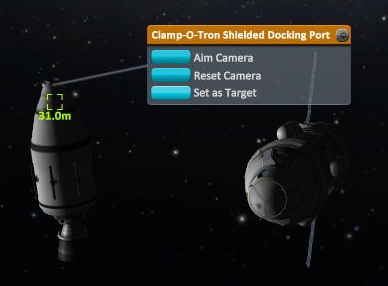
因為我們要接上對方的docking port
所以請把對方船隻的docking port設為Target
可以按右鍵打開選單,像截圖一樣。直接用滑鼠雙按也可以
如果沒有這樣設定,Target會是對方船隻Root重心,距離顯示會不準
接下來請打開自己的docking port蓋子
建議也要點擊『Control from Here』!
這會定義docking port為船隻的前進方向
在這個例子不是非常必要,因為接口在船隻頭部
但是如果接口在船身側面,這個動作就一定要做
這邊先教新手們使用最懶人的對接方式
更通用的對接方法會放後面補充
先按左右中括號 [ 或 ] ,切換到對方船隻進行控制
切換條件是雙方距離低於2公里,這也能在營業模式用於救援任務
在對方船隻把自己設定為目標,然後開SAS選擇朝向Target
想法是只要兩台船隻分別以Docking port朝向對方
那麼docking port自然就是對齊一直線的
不需要任何側向平移,直接正面推上去就接住了
切換回到原本船隻,SAS點擊朝向Target
然後開啟RCS噴嘴,進行船隻平推
RCS的操作按鈕如下:
H前進,N後退
I J K L則控制往側面的上下左右平移
這個時候我們需要按下H前進
同時觀察陀螺儀的前進方向有沒有與Target方向對準
如果偏掉了,請按I J K L調整
快要接上之前記得按N減速,不要太兇狠的撞上去
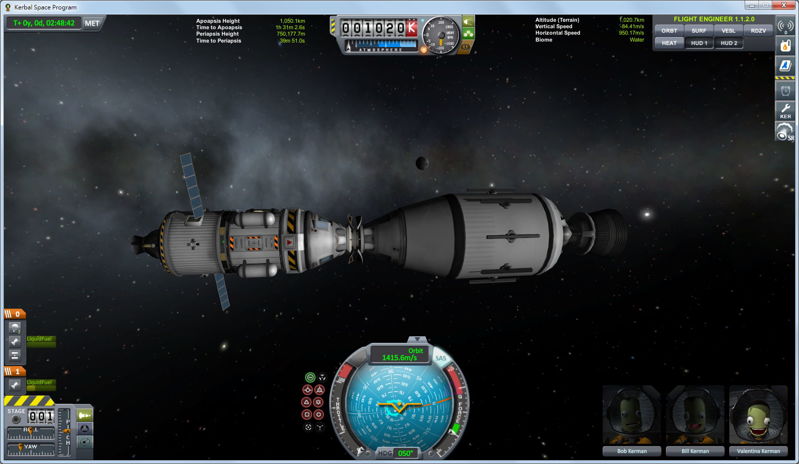
接上去之後,兩台船隻就成為一台船隻了
所有組員都會呈現在右下方
到此就過關囉
補充:
從低軌道往上衝的那次變軌可以改善
其實不需要穿過對方的軌道
只要高度能夠觸及對方軌道即可
再高就會消耗不必要的deltaV
變軌之後發現相對距離比預期更遠更差
其實可以用RCS往每個方向噴看看
如果發現可以改善會合距離的就可以馬上用引擎小修正
這個調整並不需要放置變軌點
看軌道會合點變化就可以即時觀察
更有經驗的玩家能直接看會合箭頭的前後位置與軌道交錯
就知道要朝哪裡修正,連Try都不需要
抓會合點的時機
如果兩船軌道週期差1倍以上
那麼衝上去的時機點一定在可見的一圈以內就能找到
但是如果兩船的軌道週期差不多
每圈的相位就只會往前或往後變化一點點
那就會需要繞很多圈才能找到適合的變軌點
這時可以把變軌點按加號增加圈數
或是直接切到KSC基地的追蹤站做時間快轉
經驗上這個變軌點,會在低軌道船隻要趕過高軌道船隻時,在這時間點的一圈前後之內找到
如果控制船隻與目標船隻的軌道已經非常相近,但是有相位差
這時候可以看相對位置去調週期
想要追上就減速,下降高度縮短週期。
反之想要放慢就往前加速,提高高度增加週期
然後快要追上的前後一圈內找出變軌點會合
對接口的操作
不一定每次都有辦法操縱對方船隻轉向
如果其中一方是巨大而難以滾動的艦體
例如等級E隕石太空站之類的
就只能用小船去接上對方的對接口
操作上要先把船隻移動到可以看見對接口的一側
然後先把船隻對接口的軸向與對方對接口對齊
之後就完全靠RCS平推接上去
RCS噴嘴的按鍵H N I J K L 會全部用上
兩船夠靠近時,對接口的磁力會自己吸上接住
這能力並不現實,但是可以大幅減輕玩家困難
(真實的對接口誤差要求有時會小到只有5cm,一般玩家應該會抓狂)
如果看見對接口開始吸上
有時候需要解除SAS才能順利接上
尤其是兩個對接口有點角度差的時候
SAS會驅使reaction wheel抵擋船隻滾動
這樣會讓對接口的角度無法縮小
接不上去會在那邊晃半天
這個時候暫時閃爍式的開關SAS可以解決這個問題
如果有足夠的reaction wheel
建議轉動朝向完全交給reaction wheel
先關閉RCS再滾動,然後RCS只用於平推
用RCS滾動有時候會出現額外的速度
已經歸零的相對速度或是剛對準的位置又會被破壞掉
小心主引擎的廢氣會把對方船隻吹走
太靠近對方才用主引擎減速有可能會發生這種狀況
在KSP裡面RCS的噴氣是沒有吹力的,使用上就不用擔心這點
然而在現實世界中,RCS噴氣也要非常小心
建議對接方向要預備
探照燈 剛好我的會合點在星球陰影區,幾乎暗到沒有辦法截圖
只好等兩船運行到離開影子區域才真的接上去
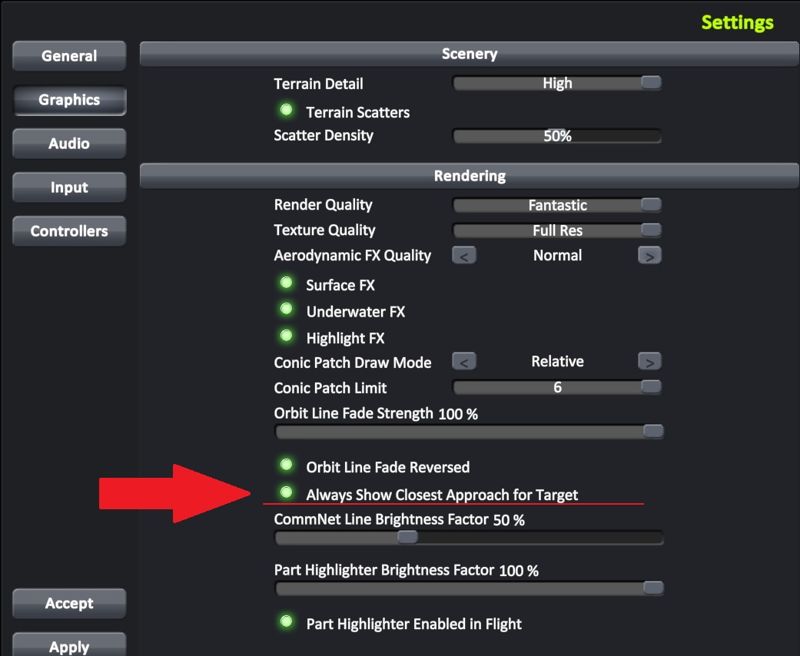
KSP遊戲的設定可以開啟永遠顯示最近點
這個功能對於行星轉換也很有幫助
非常推薦把它勾選起來
現實中火箭如何與ISS國際太空站對接
VIDEO
這會比KSP教學還要更加複雜
Low Earth Orbit到Station Orbit之間還有一個Phasing Orbit
可以讓火箭在這裡繞圈圈,然後再抓時機衝上去到太空站前面
因為每支火箭的出力都有點不同,引擎開關速度也有影響
Phasing Orbit的存在不只是為了調整時機而已
也要用來修正現實火箭的一些軌道精度問題
這個也是為何沒有直接從Low Earth Orbit抓相位就衝上去
軌道誤差可能會比較大而無法接受
 對接
對接



 上方箭頭是自己船隻最接近目標時的位置
上方箭頭是自己船隻最接近目標時的位置 下方箭頭則是Target最接近自己時的位置
下方箭頭則是Target最接近自己時的位置